Быстрая доставка
Гарантия качества
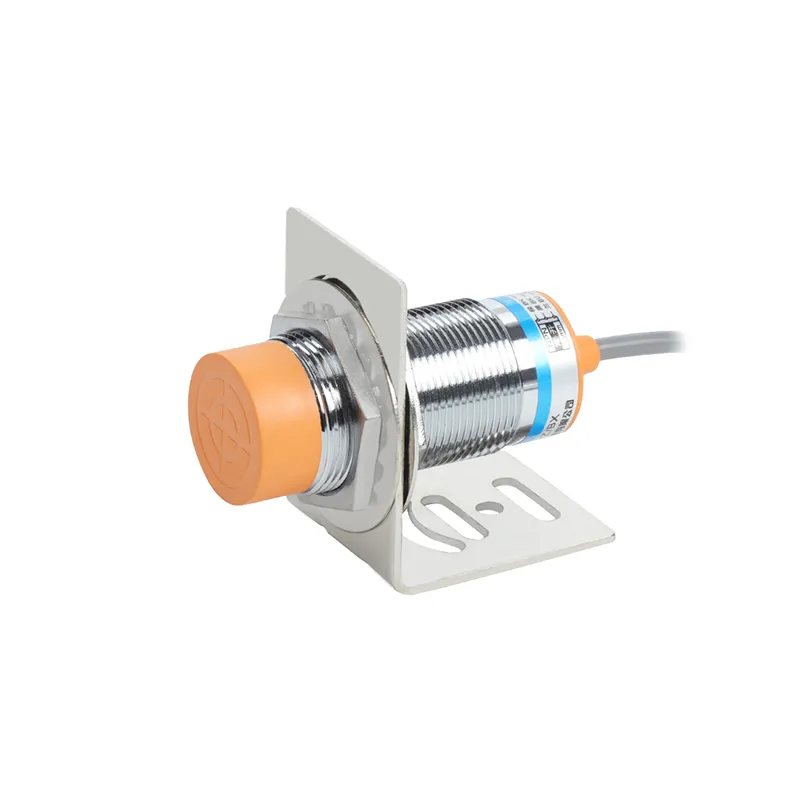
E8-D15LK NPN 15mm 6-36V 500mA
Тип датчика Индуктивный. Это значит, что он реагирует на металлические объекты, такие как железо, сталь, алюминий, латунь и медь. Принцип работы Датчик генерирует электромагнитное поле. Когда металлический объект попадает в это поле, он вызывает изменение его параметров, что и фиксируется датчиком. Дистанция срабатывания 15 мм. Это номинальное расстояние, на котором датчик способен обнаружить металлический предмет. Фактическое расстояние может немного варьироваться в зависимости от материала и размера объекта. Выходной каскад NPN. Датчик коммутирует "минус" питания (отрицательный полюс). При срабатывании он замыкает выходной контакт на "землю" (GND). Состояние выхода Нормально открытый (NO), или нормально разомкнутый. В состоянии покоя (без обнаружения объекта) выход разомкнут. При приближении металлического объекта выход замыкается. Напряжение питания 6-36 В. Датчик рассчитан на работу от источника постоянного тока в этом диапазоне напряжения. Максимальный ток 500 мА. Это максимальный ток, который может коммутировать выходной каскад. Подключаемая нагрузка не должна потреблять больше этого значения. Тип корпуса Неизвестен, но, исходя из параметров, это может быть как цилиндрический корпус (например, M30), так и прямоугольный. Способ подключения Кабель с тремя жилами (коричневый — плюс, синий — минус, чёрный — выход). Защита Вероятно, обладает степенью защиты не ниже IP67, что типично для промышленных датчиков. Подключение При подключении такого датчика следует учитывать его тип NPN: Коричневый провод подключается к плюсу (+V) источника питания. Синий провод подключается к минусу (GND) источника питания. Чёрный провод (выход) подключается к входу управляющего устройства (например, контроллера). Нагрузка (например, вход ПЛК или реле) подключается между чёрным проводом и плюсом питания. Типичное применение Контроль положения деталей в станках и оборудовании. Подсчёт металлических изделий на конвейере. Детектирование наличия металлических крышек или тары. Определение конечных положений подвижных частей механизмов.